Dijkstra 算法
Dijkstra 算法是一个最短路径算法,常用于解决非负有权图中的最短路径问题。本文通过示例介绍了 Dijkstra 算法,并给出了 C++ 的算法实现和一种优化策略。
Dijkstra 算法
介绍
Dijkstra 算法通过保留目前为止所找到的每个顶点 $v\in V$从 $s$ 到 $v$ 的最短路径来工作的。初始时,起点 $s$ 的路径权重被赋为 $0\ (dis[s]=0)$,同时把其他路径的长度设为无穷大。当算法结束后,$dis[v]$ 存储的便是从 $s$ 到 $v$ 的最短路径,如果路径不存在,则 $dis[v] = \infty $。
松弛操作是 $Dijkstra$ 算法的基础操作:如果存在一条从 $u$ 到 $v$ 的边,那么从 $s$ 到 $v$ 的一条新路径就是将边 $w(u,v) \in E$ 添加到从 $s$ 到 $u$ 的路径尾部,拓展出一条从 $s$ 到 $u$ 的路径。这条新路径的长度是 $dis[u] + w(u,v)$。如果这个值比已知的 $dis[v]$ 小,那么可以替换原先的 $dis[v]$,并将 $path[v]$ 的值更改为 $u$。松弛操作已知运行到所有的 $d[v]$ 都代表 $s$ 到 $v$ 的最短路径的长度值。
示例
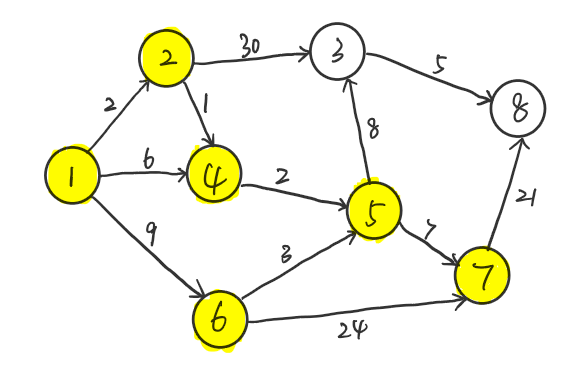
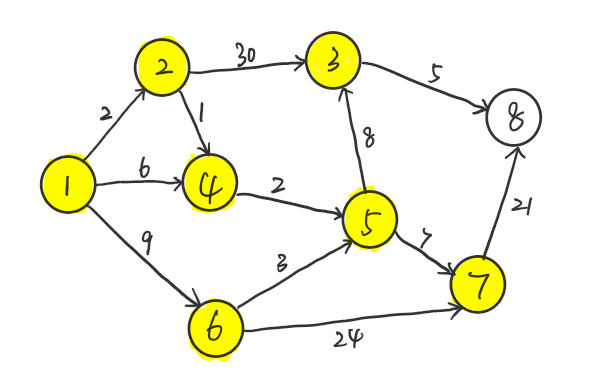
直接看介绍可能还不理解,我们可以看如下的图
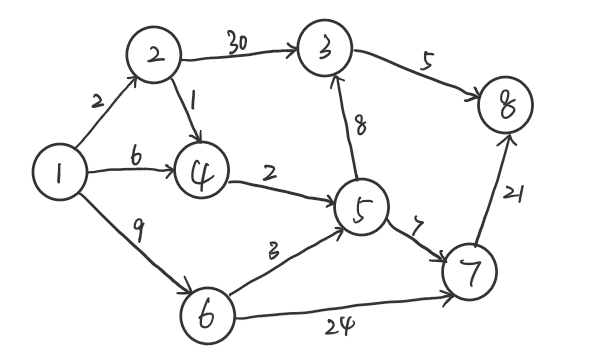
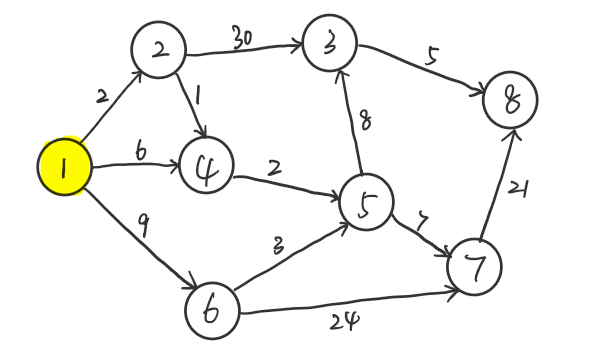
假设起点 $s = 1$,我们将 $s$ 压入路径 $q$ 中, $vis[s] = 1(true)$ , $dis[s] = 0$,寻找路径中最近的点 $u$ 即 $u=1$ ,将 $u$ 扔出路径,此时 $u$ 点连通 $v = 2,4,6$ 三点,将 $\{2,4,6\}$ 压入路径 $q$ 中,计算 $w = w(u,v)+dis[u]$,根据 $dis[v] = min(dis[v],w)$ 更新 $dis$ ,此时$dis=\{0,2,\infty,6,\infty,9,\infty,\infty,\infty\}$ ,若 $dis[v]$ 更新,就使 $path[v] = w$ ,此时 $path = \{1,1,0,1,0,1,0,0\}$ 。
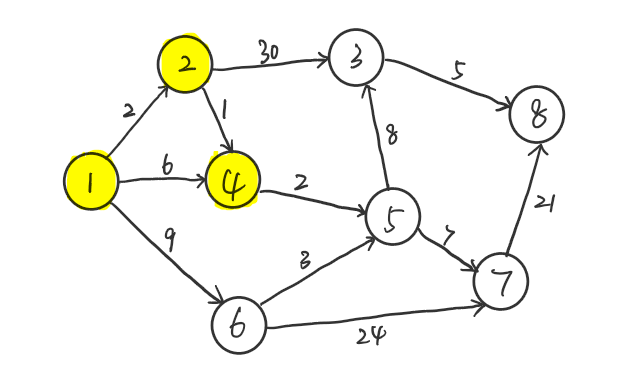
第二次,我们查找路径中与起点 $s$ 距离最近的点$u$ ,此时 $u=2$,同样将 $u$ 扔出路径并将 $vis[u]=1$, 因为$u$ 点连通 $v = 3,4$ 且 $vis[v] = 0 (false)$,所以更新路径 $q=\{3,4,6\}$,更新 $dis=\{0,2,32,3,\infty,9,\infty,\infty\} $,更新$path=\{1,1,2,2,0,1,0,0\}$。

同理,$u=4$,$vis[u]=1$,$q=\{3,5,6\}$,$dis=\{0,2,32,3,5,9,\infty,\infty\}$,$path=\{1,1,2,2,4,1,0,0\}$。
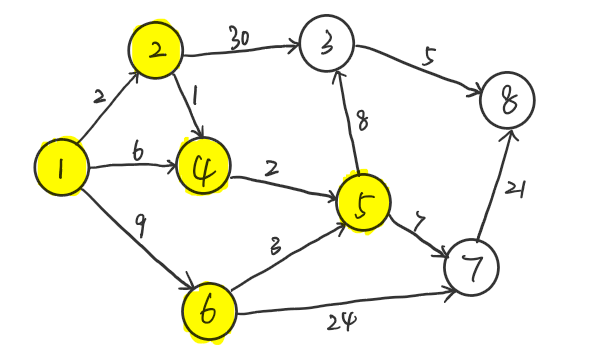
同理,$u=5$,$vis[u]=1$,$q=\{3,6,7\}$,$dis=\{0,2,13,3,5,9,12,\infty\}$,$path=\{1,1,5,2,4,1,5,0\}$。

同理,$u=6$,$vis[u]=1$,$q=\{3,7\}$,$dis=\{0,2,13,3,5,9,12,\infty\}$,$path=\{1,1,5,2,4,1,5,0\}$。
同理,$u=7$,$vis[u]=1$,$q=\{3,8\}$,$dis=\{0,2,13,3,5,9,12,33\}$,$path=\{1,1,5,2,4,1,5,7\}$。
同理,$u=3$,$vis[u]=1$,$q=\{8\}$,$dis=\{0,2,13,3,7,9,12,28\}$,$path=\{1,1,5,2,4,1,5,3\}$。
最后$u=5$,$vis[u]=1$,$q=\{\}$ 为空,到此 $Dijkstra$ 算法顺利完成!

实现及优化
首先定义 $dis,vis,path,node$。
1 | |
初始化 $dis,vis,path$
1 | |
因为有删除操作,为了减少复杂度,选择了用 std::list<> 来存储路径。
1 | |
因为在每次寻找离起点最近的点都要花费 $O(V)$ 的复杂度,所以考虑把点都存在堆中,在 C++ 中一般使用std::priority_queue<>优先队列,将每条边以 $\{u,v,w(u,v)+dis[u]\}$ 的形式压入队列中,队列顶端的元素即为边通向的顶点到起点距离的最小值,此时只要花费 $O(log(E))$ 的复杂度。总体的复杂度从 $O(V^2+E)$ 变为了 $O((E+V)log(E))$,当图为稀疏图时,使用堆的算法效率明显更高。
1 | |
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!